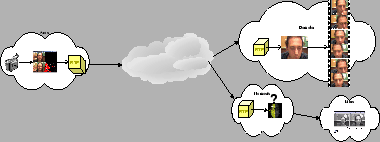
There are many operations in this system. Each component by itself performs internally many functions. This section focuses on the primary operations of a face recognition system (see Fig: 7, which are:
The camera feed is handled by one component - Ares, Ares receives the camera feed and based on motion detection engine either passes the frames on or drops them. If the frame passed the check, the frame is sent to the next two components - Demeter and Nemesis. When Demeter and Nemesis received it, they saved it locally. It's assumed that Ares has already obtained the address of Nemesis and Demeter from Hermes or individually.
Demeter stores the frames until a predefined amount of time has elapsed (usually twenty four hours) and at which point it generates a movie from the stored frames and deletes the frames.
Nemesis buffers the received frames and at some predefined period of time tries to match the frames to its internal database of pictures. If there is no match the frame is expunged. Otherwise an event (see Fig: 6) is generated which is saved locally and propagated to Mors. Mors upon receiving the message saves it locally and displays the event to the operator.